Electrical Machines II: UNIT V: b. Special Machines
A.C. Servomotor
Construction, Working Principle, Torque-speed Characteristics, Features, Applications
Most of the servomotors used in low power servomechanisms are a.c. servomotors. The a.c. servomotor is basically two phase induction motor
A.C. Servomotor
Most
of the servomotors used in low power servomechanisms are a.c. servomotors. The
a.c. servomotor is basically two phase induction motor. The output power of
a.c. servomotors varies from fraction of watt to few hundred watts. The
operating frequency is 50 Hz to 400 Hz.
1. Construction
It
is mainly divided into two parts namely stator and rotor.
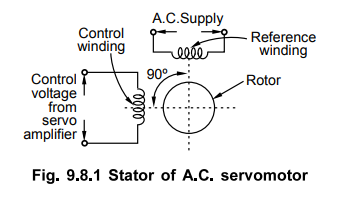
The
stator carries two windings, uniformly distributed and displaced by 90°, in
space. One winding is called main winding or fixed winding or
reference winding. This is excited by a constant voltage a.c. supply. The
other winding is called control winding.
It
is excited by variable control voltage, which is obtained from a
servoamplifier. This voltage is 90° out of phase with respect to the voltage
applied to the reference winding. This is necessary to obtain rotating magnetic
field. The schematic stator is shown in the Fig. 9.8.1.
2. Rotor
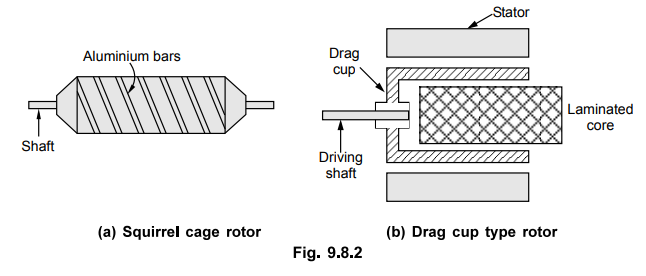
The
rotor is generally of two types. The one is usual squirrel cage rotor. This has
small diameter and large length. Aluminium conductors are used to keep weight
small. Its resistance is very high to keep torque speed characteristics as
linear as possible. Air gap is kept very small which reduces magnetising
current. This cage type of rotor is shown with skewed bars in the Fig. 9.8.2
(a). The other type of rotor is drag cup type. There are two air gaps in such
construction. Such a construction reduces inertia considerably and hence such
type of rotor is used in very low power applications. The aluminium is used for
the cup construction. The construction is shown in the Fig. 9.8.2 (b).
3. Torque-Speed Characteristics
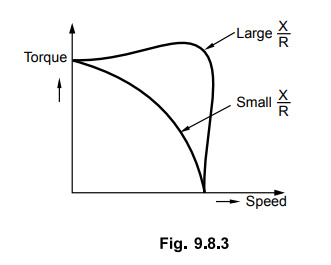
The
torque-speed characteristics of a two phase induction motor, mainly depends on
the ratio of reactance to resistance. For small X to R ratio i.e. high
resistance low reactance motor, the characteristics is much more linear while
it is nonlinear for large X to R ratio as shown in the Fig. 9.8.3.
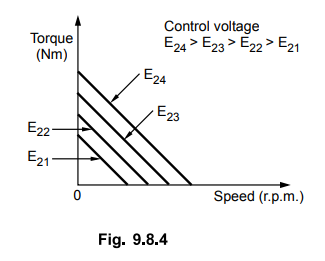
In
practice, design of the motor is so as to get almost linear torque-speed
characteristics. The Fig. 9.8.4 shows the torque-speed characteristics for
various control voltages. The torque varies almost linearly with speed. All the
characteristics are equally spaced for equal increments of control voltage. It
is generally operated with low speeds.
4. Features of A.C. Servomotor
The
a.c. servomotor has following features :
i)
Light in weight
ii)
Robust construction
iii)
Reliable and stable operation
iv)
Smooth and noise free operation
v)
Large torque to weight ratio
vi)
Large R to X ratio i.e. small X to R ratio
vii)
No brushes or slip rings hence maintenance free
viii)
Simple driving circuits.
5. Applications
Due
to the above features it is widely used in instrument servomechanisms, remote
positioning devices, process control systems, self balancing recorders,
computers, tracking and guidance systems, robotics, machine tools etc.
Review Questions
1. Write a note on a.c. servomotors.
2. Explain the construction, working, characteristics and
applications of a.c. servomotor.
Electrical Machines II: UNIT V: b. Special Machines : Tag: Engineering Electrical Machines - II : Construction, Working Principle, Torque-speed Characteristics, Features, Applications - A.C. Servomotor
Related Topics
Related Subjects

Electrical Machines II
EE3405 Machine 2 EM 2 4th Semester EEE Dept | 2021 Regulation | 4th Semester EEE Dept 2021 Regulation