Electromagnetic Theory: Unit I: (a) Vector Analysis
Cartesian Co-ordinate System
represent field vectors, Solved Example Problems
• This is also called rectangular co-ordinate system. This system has three co-ordinate axes represented as x, y and z which are mutually at right angles to each other. These three axes intersect at a common point called origin of the system. There are two types of such system called 1. Right handed system and 2. Left handed system.
Cartesian
Co-ordinate System
AU : May-05, Dec.-08
•
This is also called rectangular
co-ordinate system. This system has three co-ordinate axes represented as
x, y and z which are mutually at right angles to each other. These three axes
intersect at a common point called origin
of the system. There are two types of such system called
1.
Right handed system and 2. Left handed system.
•
The right handed system means if x axis is rotated towards y axis through a
smaller angle, then this rotation causes the upward movement of right handed
screw in the z axis direction. This is shown in the Fig. 1.6.1 (a). In this
system, if right hand is used then thumb indicates x axis, the forefinger
indicates y axis and middle finger indicates z axis, when three fingers are
held mutually perpendicular to each other.
•
In left handed system x and y axes are interchanged compared to right handed
system. This means the rotation of x axis into y axis through smaller angle
causes the downward movement of right handed screw in the z axis direction.
This is shown in the Fig. 1.6.1 (b).

Key Point :
The right handed system is very
commonly used and followed in this book.
•
In cartesian co-ordinate system x = 0 plane indicates two dimensional y-z
plane, y = 0 plane indicates two dimensional x-z plane and z = 0 plane
indicates two dimensional x-y plane.
1. Representing a point in rectangular co-ordinate system
• A point in rectangular co-ordinate system is located by three co-ordinates namely x, y and z co-ordinates. The point can be reached by moving from origin, the distance x in x direction then the distance y in y direction and finally the distance z in z direction. Consider a point P having co-ordinates X1,Y1 and Z1 It is represented as P (x1,y1,z1 )
• It can be shown as in the Fig. 1.6.2 (a) The co-ordinates X1,y1
and z1 can be positive or negative. The point Q (3,-1,2) can be
shown in this system as in the Fig. 1.6.2 (b).

•
Another method to define a point is to consider three surfaces namely x =
Constant, y = Constant and z =
Constant planes. The common intersection point of these three surfaces is the
point to be defined and the constants indicate the co-ordinates of that point.
For example, consider point Q which is intersection of three planes namely x =
3 plane, y = -1 plane and z = 2 plane. The planes x = Constant, y = Constant
and z = Constant are shown in the Fig. 1.6.3. (Refer Fig. 1.6.3 ).
The constants may be positive or negative.

2. Base Vectors
•
The base vectors are the unit
vectors which are strictly oriented along the directions of the co-ordinate
axes of the given co-ordinate system.
•
Thus for cartesian co-ordinate system,
the three base vectors are the unit vectors oriented in x, y and z axis of the
system. So 
are the base vectors of cartesian co-ordinate system. These are shown in the Fig. 1.6.4.

•
So any point on x-axis having co-ordinates (x1,0,0) can be
represented by a vector joining origin to this point and denoted as x1 
•
The base vectors are very important in representing a vector in terms of its
components, along the three co-ordinate axes.
3. Position and Distance Vectors
•
Consider a point P (x1,y1,z1) in cartesian
co-ordinate system as shown in the Fig. 1.6.5. Then the position vector of point P is represented by the distance of point
P from the origin, directed from origin to point P. This is also called radius vector. This is also shown in
the Fig. 1.6.5.

•
Now the three components of this position vector ![]() are three
vectors oriented along the three co-ordinate axes with the magnitudes x1,y1
and z1.Thus the position vector of point P can be represented as,
are three
vectors oriented along the three co-ordinate axes with the magnitudes x1,y1
and z1.Thus the position vector of point P can be represented as,
 ....(1.6.1)
....(1.6.1)
•
The magnitude of this vector interms
of three mutually perpendicular components is given by,
 Thus
if point P has co-ordinates (1,2,3) then its position vector is,
Thus
if point P has co-ordinates (1,2,3) then its position vector is,

•
Many a times the position vector is denoted by the vector representing that
point itself i.e. for point P the position vector is ![]() for point Q it
is
for point Q it
is ![]() and so on. The same method is used hereafter in this book. Note
the difference between a point and a position vector.
and so on. The same method is used hereafter in this book. Note
the difference between a point and a position vector.
•
Now consider the two points in a cartesian co-ordinate system, P and Q with the
co-ordinates (x1,y1,z1) and (x2,y2,z2)
respectively. The points are shown in the Fig. 1.6.6.
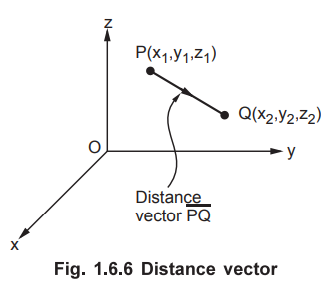
The individual position vectors of the points are,

•
Then the distance or the displacement from P to Q is represented by a distance vector ![]() and is given by,
and is given by,

•
This is also called separation vector.
•
The magnitude of this vector is given by,

•
This is nothing but the length of the vector PQ. The equation (1.6.4) is called
distance formula which gives the
distance between the two points representing tips of the vectors.
•
Using the basic concept of unit vector, we can find unit vector along the
direction PQ as,

•
Once the position vectors are known then various mathematical operations can be
easily performed interms of the components of the various vectors.
•
Let us summarize procedure to obtain distance
vector and unit vector.
Step 1 : Identify
the direction of distance vector i.e. starting point (x1,y1,z1)
and terminating point (x2,y2,z2)
Step 2 : Subtract
the respective co-ordinates of starting point from terminating point. These are
three components of distance vector i.e. 
Step 3 : Adding
the three components distance vector can be obtained.
Step 4 : Calculate
the magnitude of the distance vector using equation (1.6.4).
Step 5 : Unit
vector along the distance vector can be obtained by using equation (1.6.5).
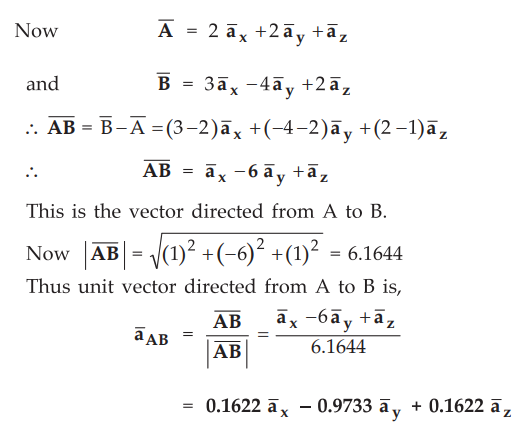
Ex. 1.6.1
Two points A (2, 2,1) and B (3, -4, 2) are
given in the cartesian system. Obtain the vector from A to B and a unit vector
directed from A to B.
Sol. :
The starting point is A and terminating point is B.
•
It can be cross checked that magnitude of this unit vector is unity i.e.
√(0.1622)2
+ (-0.9733)2 + (0.1622)2 = 1
4. Differential Elements in Cartesian Co-ordinate System
•
Consider a point P (x, y, z) in the rectangular co-ordinate system. Let us
increase each co-ordinate by a differential amount. A new point P' will be
obtained having co-ordinates (x + dx, y + dy, z + dz).
Thus, dx = Differential length in x direction
dy
= Differential length in y direction
dz
= Differential length in z direction
•
Hence differential vector length also called elementary vector length can be represented as,
 ....(1.6.6)
....(1.6.6)
•
This is the vector joining original point P to new point P'.
•
Now point P is the intersection of three planes while point P' is the
intersection of three new planes which are slightly displaced from original
three planes. These six planes together define a differential volume which is a
rectangular parallelepiped as shown in the Fig. 1.6.7. The diagonal of this
parallelepiped is the differential vector length.

•
The distance of P' from P is given by magnitude of the differential vector
length,
 ....(1.6.7)
....(1.6.7)
•
Hence the differential volume of the
rectangular parallelepiped is given by,
dv
= dx dy dz .....(1.6.8)
•
Note that ![]() is a vector but dv is a scalar.
is a vector but dv is a scalar.
•
Let us define differential surface
areas. The differential surface element ![]() is represented as,
is represented as,
 .....(1.6.9)
.....(1.6.9)
where
dS = Differential surface area of the element
![]() = Unit vector normal to the surface dS
= Unit vector normal to the surface dS
•
Thus various differential surface elements in cartesian co-ordinate system are
shown in the Fig. 1.6.8.
•
The vector representation of these elements is given as,

•
The differential elements play very important role in the study of engineering
electromagnetics.
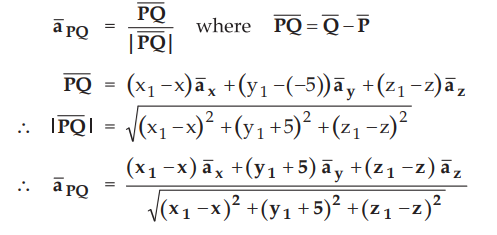
Ex. 1.6.2 Find the unit vector directed
towards the point (x1 ,y1,z1 ) from an
arbitral point in the plane y = -5 .
Sol. :
The plane y = - 5 is parallel to xz plane as shown in the Fig. 1.6.9.

•
The co-ordinates of point P are (x, - 5, z) as y = - 5 is constant. While Q is
arbitrary point having co-ordinates (x1,y1,z1).
To find unit vector along the direction PQ.
Examples for Practice
Ex. 1.6.3 : 
Ex. 1.6.4 :
Obtain the unit vector in the direction
from the origin towards the point P (3, -3,-2).

Review Question
1. Discuss the
cartesian co-ordinate system used to represent field vectors. AU : May-05, Dec.-08
Electromagnetic Theory: Unit I: (a) Vector Analysis : Tag: : represent field vectors, Solved Example Problems - Cartesian Co-ordinate System
Related Topics
Related Subjects

Electromagnetic Theory
EE3301 3rd Semester EEE Dept | 2021 Regulation | 3rd Semester EEE Dept 2021 Regulation