Electromagnetic Theory: Unit I: (a) Vector Analysis
Cylindrical Co-ordinate System
represent field vectors, Solved Example Problems
• The circular cylindrical co-ordinate system is the three dimensional version of polar co-ordinate system. The surfaces used to define the cylindrical co-ordinate system are,
Cylindrical
Co-ordinate System
AU : May-05, Dec.-08
•
The circular cylindrical co-ordinate system is the three dimensional version of
polar co-ordinate system. The surfaces used to define the cylindrical
co-ordinate system are,
1.
Plane of constant z which is parallel to xy plane.
2.
A cylinder of radius r with z axis as the axis of the cylinder.
3.
A half plane perpendicular to xy plane and at an angle with respect to xz
plane. The angle ϕ is called azimuthal
angle.
•
The ranges of the variables are,
0
≤ r ≤ ∞... (1.7.1)
0
≤ ϕ ≤ 2π ... (1.7.2)
-∞
< z ≤ ∞ ... (1.7.3)
•
The point P in cylindrical co-ordinate system has three co-ordinates r, ϕ and z
whose values lie in the respective ranges given by the equations (1.7.1),
(1.7.2) and (1.7.3).
•
The point P(r,ϕ1,z1) can be shown as in the Fig. 1.7.1
(b).

Key Point :
Note that angle ϕ is expressed in radians and for ϕ anticlockwise measurement is treated positive while clockwise
measurement is treated negative.
•
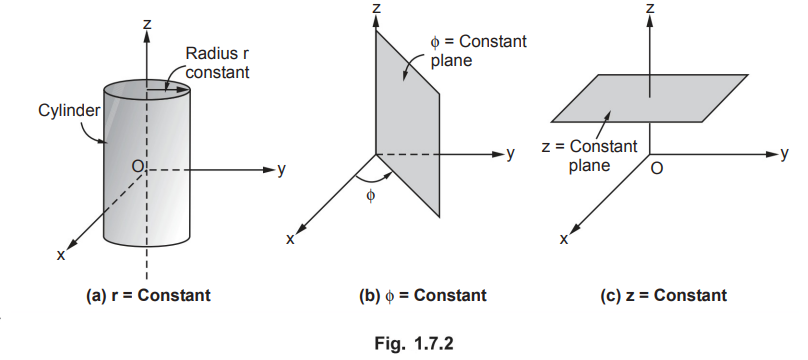
The point P can be defined as the intersection of three surfaces in cylindrical
co-ordinate system. These three surfaces are,
r
= Constant which is a circular cylinder with z-axis as its axis.
ϕ
= Constant plane which is a vertical plane perpendicular to xy plane making
angle ϕ with respect to xz plane.
z
= Constant plane is a plane parallel to xy plane.
•
These surfaces are shown in the Fig. 1.7.2.
•
The intersection of any two surfaces out of the above three surfaces is either
a line or a circle and intersection of three surfaces defines a point P.
•
The intersection of z = Constant and r = Constant is a circle. The intersection
of ϕ = Constant and r = Constant is a line. The point P which is intersection
of all three surfaces is shown in the Fig. 1.7.3.

1. Base Vectors
•
Similar to cartesian co-ordinate system, there are three unit vectors in the r,
and z directions denoted  .
.
•
These unit vectors are shown in the Fig. 1.7.4.

•
These are mutually perpendicular to each other.
•
The ![]() lies in a plane parallel to the xy plane and is
perpendicular to the surface of the cylinder at a given point, coming radially
outward.
lies in a plane parallel to the xy plane and is
perpendicular to the surface of the cylinder at a given point, coming radially
outward.
•
The unit vector ![]() lies also in a plane parallel to the xy plane but
it is tangent to the cylinder and pointing in a direction of increasing ϕ at
the given point.
lies also in a plane parallel to the xy plane but
it is tangent to the cylinder and pointing in a direction of increasing ϕ at
the given point.
•
The unit vector![]() is parallel to z axis and directed towards
increasing z.
is parallel to z axis and directed towards
increasing z.
• Hence vector of point P can be represented
as, • Thus the differential lengths are,
 ...
(1.7.4)
...
(1.7.4)
where Pr is radius r, Pϕ
is angle ϕ and Pz is z co-ordinate of point p.
Key Point :
In cartesian co-ordinate system, the unit vectors are not dependent on the
co-ordinates. But in cylindrical co-ordinate system  functions
of co-ordinate as their directions change as changes. Hence in integration or
differentiation with respect to ^components in should not
be treated constants.
functions
of co-ordinate as their directions change as changes. Hence in integration or
differentiation with respect to ^components in should not
be treated constants.
2. Differential Elements in Cylindrical Co-ordinate System
•
Consider a point P (r,ϕ,z) in a cylindrical co-ordinate system. Let each
co-ordinate is increased by the differential amount. The differential increments
in r, ϕ, z are dr, dϕ and dz respectively.
•
Now there are two cylinders of radius r and r + dr. There are two radial planes
at the angles and ϕ + dϕ. And there are two horizontal planes at the heights z
and z + dz. All these surfaces enclose a small volume as shown in the Fig.
1.7.5.

•
The differential lengths in r and z directions are dr and dz respectively. In ϕ
direction, dϕ is the change in angle ϕ and is not the differential length. Due
to this change dϕ, there exists a differential arc length in ϕ direction. differential
length, due to dϕ, in ϕ direction is r dϕ as shown in the Fig. 1.7.5.
•
Thus the differential lengths are,
dr
= Differential length in r direction ... (1.7.5)
r
dϕ = Differential length in direction ... (1.7.6)
dz
= Differential length in z direction ... (1.7.7)
•
Hence the differential vector length
in cylindrical co-ordinate system is given by,
 ...
(1.7.8)
...
(1.7.8)
•
The magnitude of the differential length vector is given by,
 ...
(1.7.9)
...
(1.7.9)
•
Hence the differential volume of the
differential element formed is given by,
dv = r dr dϕ dz... (1.7.10)
• The differential surface areas in the three directions are shown in the Fig. 1.7.6.

•
The vector representation of these differential surface areas are given by,

3. Relationship between Cartesian and Cylindrical Systems
•
Consider a point P whose cartesian co-ordinates are x, y and z while the
cylindrical co-ordinates are r, and z, as shown in the Fig. 1.7.7.

•
Looking at the xy plane we can write,
x
= r cos ϕ and y = r sin ϕ
•
The z remains same in both the systems.
Hence
transformation from cylindrical to cartesian can be obtained from the
equations,
x
= r cos ϕ, y = r sin ϕ, and z = z... (1.7.14)
•
It can be seen that, r can be expressed interms of x and y as,
r
= √ x2 + y2
while
tan ϕ = y/x
•
Thus the transformation from cartesian to cylindrical can be obtained from the
equations,
r
= √x2 + y2 , ϕ = tan-1 y/x and z = z .....(1.7.15)
Note :
While using the equations (1.7.15) note that r is positive or zero, hence
positive sign of square root must be considered. While calculating ϕ make sure the signs of x and y. If both are
positive, ϕ is positive in the first quadrant. If x is negative and y is
positive then the point is in the second quadrant hence 6 must be within +90°
and +180° i.e. within -180° and -270°. Thus for x = -2 and y = 1 we get ϕ = tan-1[1/-2]
= -26.56° but it should be taken as -26.56o + 180° i.e. 154.43°.
Hence when x is negative, it is necessary to add 180° to the ϕ calculated using
tan-1 function, to obtain accurate ϕ corresponding to the point.
When y is negative and x is positive then ϕ is m fourth quadrant i.e. within 0°
and -90° i.e. 270° and 360°. Similarly when x is negative and y is also
negative the point is in third quadrant and accordingly ϕ must be between 0-90°
to -180° i.e. +180° and +270°. So 180° must be subtracted from the 6 calculated
by tan- function, to get accurate 6 when both x and y are negative. Thus if x =
y = -3 then ϕ = tan-l[-3/-3] = + 45° but actually it is 45°-180°=-135°
i.e. -135°+360°=+225°.
Ex. 1.7.1
Find the area of the curved surface using
the cylindrical co-ordinates which lies on the right circular cylinder of
radius 2 m, height 8 m and 45°< ϕ <90°.
Sol. :
The surface is shown in the Fig. 1.7.8.

The
differential area normal to ![]() is,
is,

The
surface is constant r surface and normal to it is unit vector ![]() .
.

=
2 × [90°-45°] × |π/180o × [8 -0]
...Use
ϕ in radians
2
×45° × π ×8 / 180° = 12.5663 m2
Examples for Practice
Ex. 1.7.2
Consider a cylinder of length L and radius
R. Obtain its volume by integration.[
Ans.: π R2L]
Ex. 1.7.3 Use the cylindrical co-ordinate system to find the area of the curved surface of a right circular cylinder where r = 20 m, h = 5 m and 3O°<ϕ < 120° [Ans.: 157.0796 m2]
Ex. 1.7.4 Calculate the total surface area of the cylinder having length L and radius R by the method of integration. [Ans.: 2π R(R + L)]
Review Question
1. Discuss the
cylindrical co-ordinate system used to represent field vectors. AU : May-05, Dec.-08,
Marks 5
Electromagnetic Theory: Unit I: (a) Vector Analysis : Tag: : represent field vectors, Solved Example Problems - Cylindrical Co-ordinate System
Related Topics
Related Subjects

Electromagnetic Theory
EE3301 3rd Semester EEE Dept | 2021 Regulation | 3rd Semester EEE Dept 2021 Regulation