Electrical Machines II: UNIT II: Synchronous Motor
Hunting in Synchronous Motor
When motor is loaded, the rotor pole axis falls back with respect to stator.
Hunting in Synchronous Motor
It
is seen that, when synchronous motor is on no load, the stator and rotor pole
axes almost coincide with each other.
When
motor is loaded, the rotor pole axis falls back with respect to stator. The
angle by which rotor retards is called load angle or angle of retardation δ .
If
the load connected to the motor is suddenly changed by a large amount, then
rotor tries to retard to take its new equilibrium position.
But
due to inertia of the rotor, it cannot achive its final position
instantaneously. While achieving ist new position due to inertia it passes
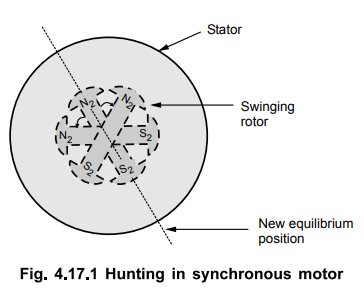
beyond its final position corresponding to new load. This will produce more torque
than what is demanded. This will try to reduce the load angle and rotor swings
in other direction. So there is periodic swinging of the rotor on both sides of
the new equilibrium position, corresponding to the load. Such a swing is shown
in the Fig. 4.17.1.
Such
oscillations of the rotor about its new equilibrium position, due to sudden
application or removal of load is called swinging or hunting in synchronous
motor.
The
main causes of hunting are,
1.
Sudden change in the load.
2.
Fault in the supply system.
3.
Sudden change in the field current.
4.
A load containing harmonic torque.
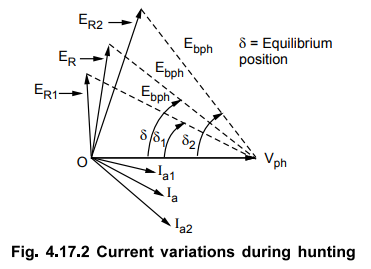
Due
to such hunting, the load angle δ changes its value about its final value. As δ
changes, for same excitation i.e. Ebph the current drawn by the
motor also changes. Hence during hunting there are changes in the current drawn
by the motor which may cause problem to the other appliances connected to the
same line. The changes in armature current due to hunting is shown in the Fig.
4.17.2.
If
such oscillations continue for longer period, there are large fluctuations in
the current. If such variations synchronise with the natural period of
oscillation of the rotor, the amplitude of the swing may become so great that
motor may come out of synchronism. At this instant mechanical stresses on the
rotor are severe and current drawn by the motor is also very large. So motor
gets subjected to large mechanical and electrical stresses.
The
various undesirable effects of hunting are,
1.
It may lead to loss of synchronism.
2.
It produces large mechanical stress.
3.
It causes increase in losses and increases temperature rise.
4.
It causes large changes in current and power flow.
Key Point Hence hunting is
not desirable phenomenon from motor point of view and must be prevented.
1. Use of Damper Winding to Prevent Hunting
It
is mentioned earlier that in the slots provided in the pole faces, a short
circuited winding is placed. This is called damper winding.
When
rotor starts oscillating i.e. when hunting starts a relative motion between
damper winding and the rotating magnetic field is created. Due to this relative
motion, e.m.f. gets induced in the damper winding. According to Lenz's law, the
direction of induced e.m.f. is always so as to oppose the cause producing it.
The cause is the hunting. So such induced e.m.f. oppose the hunting. The
induced e.m.f. tries to damp the oscillations as quickly as possible. Thus
hunting is minimised due to damper winding.
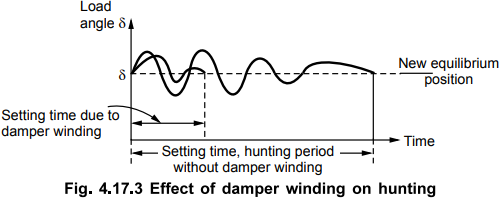
The
time required by the rotor to take its final equilibrium position after hunting
is called as setting time of the rotor. If the load angle δ is plotted against
time, the schematic representation of hunting can be obtained as shown in the
Fig. 4.17.3. It is shown in the diagram winding the setting time of the rotor
reduces considerably.
Review Question
1. What is hunting ? State its causes. How it can be minimized 1
Explain the use of damper winding in synchronous motor.
Electrical Machines II: UNIT II: Synchronous Motor : Tag: Engineering Electrical Machines - II : - Hunting in Synchronous Motor
Related Topics
Related Subjects

Electrical Machines II
EE3405 Machine 2 EM 2 4th Semester EEE Dept | 2021 Regulation | 4th Semester EEE Dept 2021 Regulation