Electrical Machines II: UNIT V: b. Special Machines
Hysteresis Motor
Construction, Working Principle, Torque-speed Characteristics, Advantages, Limitations
This is the synchronous motor which does not require any d.c. excitation to the rotor and it uses non projected poles.
Hysteresis Motor
This
is the synchronous motor which does not require any d.c. excitation to the
rotor and it uses non projected poles.
It
consists of a stator which carries main and auxiliary windings so as to produce
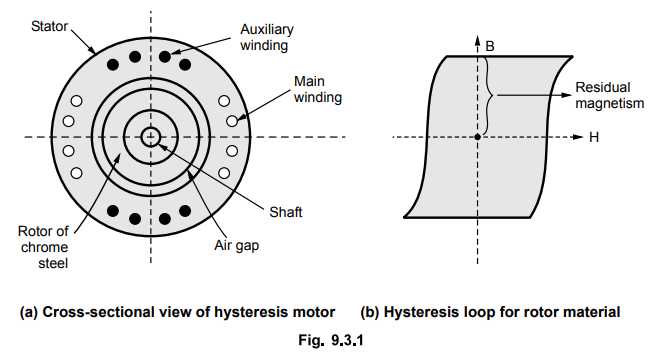
rotating magnetic field. The stator can also be shaded pole type. The rotor is
smooth cylindrical type made up of hard magnetic material like chrome steel or
alnico for high retentivity. This requires to select a material with high
hysteresis loop area. The rotor does not carry any winding. The construction is
shown in the Fig. 9.3.1 (a) while nature of hysteresis loop required for rotor
material is shown in the Fig. 9.3.1 (b).
When
stator is energised, it produces rotating magnetic field. The main and
auxiliary, both the windings must be supplied continuously at start as well as
in running condition so as to maintain the rotating magnetic field. This field
induces poles in the rotor. The hysteresis phenomenon is dominant for the rotor
material chosen and due to which rotor pole axis lag behind the axis of
rotating magnetic field. Due to this, rotor poles get attracted towards the
moving stator field poles. Thus rotor gets subjected to torque called hysteresis
torque. This torque is constant at all speeds. When the stator field axis
moves forward, due to high retentivity the rotor pole strength remains
maintained. So higher the retentivity, higher is the hysteresis torque.
Initially
rotor starts rotating due to combined effect of hysteresis torque as well as
torque due to eddy currents induced in the rotor. Once the speed is near about
the synchronous, the stator pulls rotor into synchronism. In such case, as
relative motion between stator field and rotor vanishes, so the torque due to
eddy currents vanishes. Only hysteresis torque is present which keeps rotor
running at synchronous speed. The high retentivity, ensures the continuous
magnetic locking between stator and rotor. Due to principle of magnetic
locking, the motor either rotates at synchronous speed or not at all.
1. Mathematical Analysis
The
eddy current loss in the machines is given by,
Pe
= Ke f22 B2
where Ke = Eddy current
constant, f2 = Frequency of eddy currents,
B
= Flux density
We
know the relation between rotor frequency f2 and supply frequency f1
F2
= sf1
where s = Slip
Pe
= Ke s2 f21 B2
The
torque due to eddy currents is given by

So
when rotor rotates at synchronous speed, the slip becomes zero and torque due
to eddy current component vanishes. It only helps at start.
The
hysteresis loss is given by,
Ph
= Kh f2 B1.6 = Kh sf1 B1.6
The
corresponding torque is given by,
where Th = Ph / s ws K
= Constant
Key Point Thus the
hysteresis torque component is constant at all the rotor speeds.
2. Torque-Speed Characteristics
The
starting torque and running torque is almost equal in this type of motor. As
stator carries mainly the two windings its direction can be reversed by
interchanging the terminals of either main winding or auxiliary winding. The
torque-speed characteristics is as shown in the Fig. 9.3.2.
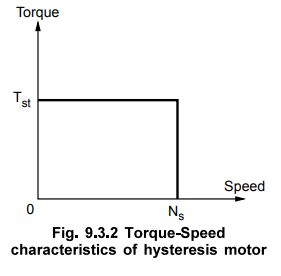
As
seen from the characteristics torque at start is almost same throughout the
operation of the motor.
3. Advantages
The
advantages of this motor are :
1)
As rotor has no teeth, no winding, there are no mechanical vibrations.
2)
Due to absence of vibrations, the operation is quiet and noiseless.
3)
Suitability to accelerate high inertia loads.
4)
Possibility of multispeed operation by employing gear train.
4. Applications
Due
to noiseless operation it is used in sound recording instruments, sound
producing equipments, high quality record players, tape recorders, electric
clocks, teleprinters, timing devices etc.
Review Questions
1. Write a note on hysteresis motor.
2. With neat sketches explain the salient features of hysteresis
motor.
3. Explain the construction and working of hysteresis motor.
Electrical Machines II: UNIT V: b. Special Machines : Tag: Engineering Electrical Machines - II : Construction, Working Principle, Torque-speed Characteristics, Advantages, Limitations - Hysteresis Motor
Related Topics
Related Subjects

Electrical Machines II
EE3405 Machine 2 EM 2 4th Semester EEE Dept | 2021 Regulation | 4th Semester EEE Dept 2021 Regulation