Linear Integrated Circuits: Unit III: Applications of Op-amp
Important Remarks and Observations about Filters
Operational amplifier (Op-amp)
As the filter is frequency selective network, the output Vo(t) contains only some of the frequency components of Vin (t). It is convenient to analyze the filter by representing it in a frequency domain as shown in Fig. 3.5.1 (b). In the frequency domain, the filter is described by the transfer function,
Important Remarks and Observations about Filters
The
filter can be represented in the time domain and frequency domain as shown in
Fig. 3.5.1 (a) and (b).
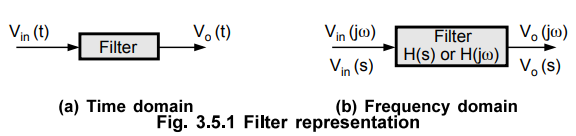
As
the filter is frequency selective network, the output Vo(t) contains
only some of the frequency components of Vin (t). It is convenient
to analyze the filter by representing it in a frequency domain as shown in Fig.
3.5.1 (b). In the frequency domain, the filter is described by the transfer
function,
H(s)
= Vo (s) / Vin (s) … (3.5.1 a)
or H(j ω) = Vo (j
ω)
/ Vin (j ω) … (3.5.1 b)
where
ω = 2лf and f is the operating frequency. In the steady state, the transfer
function can be represented in the polar form as,

The
magnitude is generally represented in dB as 20 log |H (jω)|. In the frequency
response of various filters discussed above, the magnitude i.e. gain is plotted
against the frequency. Thus, the magnitude of the transfer function | H (jω) |
= | Vo(j ω) / Vin (j ω) is called gain of the filter. The
filters are analy zed and designed considering the magnitude and the phase
angle of the transfer function.
An
important thing can be observed from the frequency responses discussed above is
the behaviour of the gain in the stop band for the various filters. The
frequency response either decreases or increases or both in the stop band. The
rate at which the gain of the filter changes in the stop band is dependent on
the order of the filter. If the filter is first order then gain increases at a
rate 20 dB/decade in a stop band of high pass filter, the gain decreases at a
rate 20 dB/decade in a stop band of low pass filter and so on. This indicates
that there is a change of 20 dB in a gain per decade (10 times) change in the
frequency. Such a change in gain is called gain roll off.
Key
Point In case of a second order filters, the gain roll
off is at the rate of 40 dB/decade and so on.
The
various types of filters used in practice which approximately produce the ideal
response are : i) Butterworth filters ii) Chebyshev filters iii) Cauer filters.
1. Butterworth Approximation
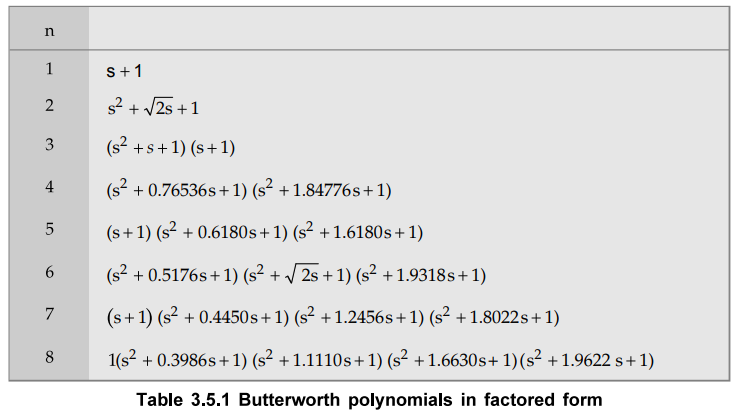
The
filter in which denominator polynomial of its transfer function is a
Butterworth polynomial is called a Butterworth filter. The Butterworth
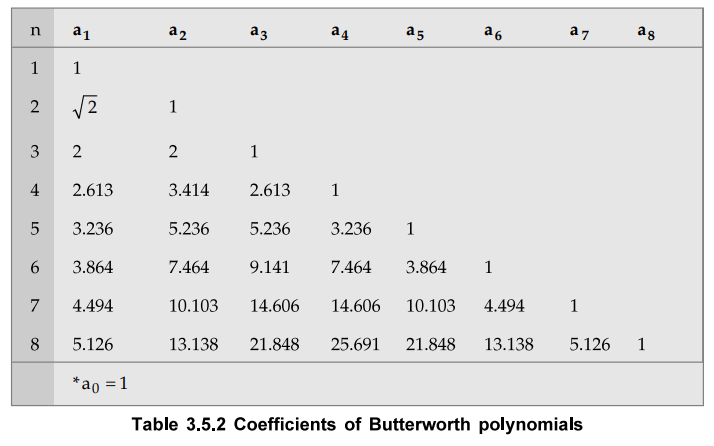
polynomials of various orders are given in the Tables 3.5.1 and 3.5.2.
The
coefficients of Butterworth polynomials are as given in the Table 3.5.2.
Some
important observations of Butterworth polynomials expressed in factored form as
given in the Table 3.5.2 are as follows :
1.
Coefficient of the highest power of s is always 1 for any order of filter.
2.
Lowest order term i.e. constant term is always 1 for any order of filter.
3.
For all odd ordered filters, one of the factors is always (s + 1) while the remaining
factors are quadratic in nature.
4.
For all even ordered filters, all factors are quadratic in nature.
5.
All the poles of Butterworth polynomial are located in left half of s-plane on
a circle with radius equal to one and centre at origin.
Review Question
1. Write a note on
Butterworth approximation.
Linear Integrated Circuits: Unit III: Applications of Op-amp : Tag: : Operational amplifier (Op-amp) - Important Remarks and Observations about Filters
Related Topics
Related Subjects
Linear Integrated Circuits
EE3402 Lic Operational Amplifiers 4th Semester EEE Dept | 2021 Regulation | 4th Semester EEE Dept 2021 Regulation