Electromagnetic Theory: Unit I: (a) Vector Analysis
Spherical Co-ordinate System
represent field vectors, Solved Example Problems
• The surfaces which are used to define the spherical co-ordinate system on the three cartesian axes are,
Spherical
Co-ordinate System
AU : May-05, 10,18, Dec.-07, 08.18
•
The surfaces which are used to define the spherical co-ordinate system on the
three cartesian axes are,
1.
Sphere of radius r, origin as the centre of the sphere.
2.
A right circular cone with its apex at the origin and its axis as z axis. Its
half angle is θ. It rotates about z axis and θ varies from 0 to 180s.
3.A
half plane perpendicular to xy plane containing z axis, making an angle ϕ with
the xz plane.
•
Thus the three co-ordinates of a point P in the spherical co-ordinate system
are (r, θ,ϕ). These surfaces are shown in the Fig. 1.8.1.

•
The ranges of the variables are,
0
≤ r < ∞... (1.8.1)
0
≤ ϕ ≤ 2π ... (1.8.2)
0
≤ θ ≤ π ... (1.8.3)
•
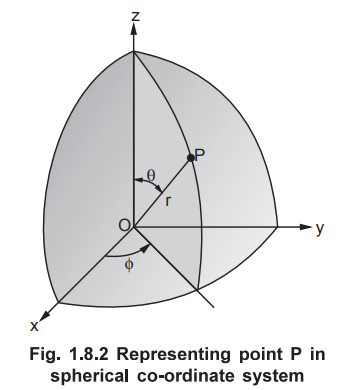
The point P (r, θ,ϕ) can be represented in the spherical co-ordinate system as
shown in the Fig. 1.8.2. The angles θ and ϕ are measured in radians.
•
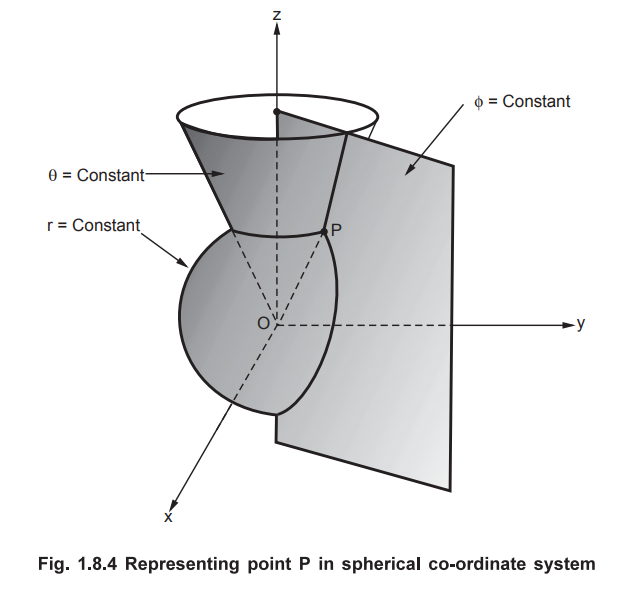
The point P can be defined as the intersection of three surfaces in spherical
co-ordinate system. These three surfaces are,
r
= Constant which is a sphere with centre as origin.
θ
= Constant which is right circular cone with apex as origin and axis as z-axis.
Φ
= Constant is a plane perpendicular to xy plane.
•
The surfaces are already shown in the Fig. 1.8.1. The intersection of the
sphere i.e. r = Constant surface and right circular cone i.e. θ = Constant
surface is a horizontal circle as shown in the Fig. 1.8.3. As seen from the
Fig. 1.8.3, the radius of this circle is r sin θ.

• Now consider intersection of ϕ = Constant plane with the intersection of r = Constant and θ = Constant planes as shown in the Fig. 1.8.4. This defines a point P.
1. Base Vectors
•
Similar to other two co-ordinate systems, there are three unit vectors in the
r, θ and ϕ directions denoted as  These unit
vectors are mutually perpendicular to each other and are shown in the Fig.
1.8.5. The unit vector
These unit
vectors are mutually perpendicular to each other and are shown in the Fig.
1.8.5. The unit vector ![]() is directed from the centre of the sphere
i.e. origin to the given point P. It is directed radially outward, normal to
the sphere. It lies in the cone θ = Constant and plane ϕ = Constant.
is directed from the centre of the sphere
i.e. origin to the given point P. It is directed radially outward, normal to
the sphere. It lies in the cone θ = Constant and plane ϕ = Constant.

•
The unit vector a ![]() is tangent to the sphere and oriented in the
direction of increasing θ. It is normal to the conical surface.
is tangent to the sphere and oriented in the
direction of increasing θ. It is normal to the conical surface.
•
The third unit vector ![]() is tangent to the sphere and also tangent to
the conical surface. It is oriented in the direction of increasing ϕ. It is
same as defined in the cylindrical co-ordinate system.
is tangent to the sphere and also tangent to
the conical surface. It is oriented in the direction of increasing ϕ. It is
same as defined in the cylindrical co-ordinate system.
•
Hence vector of point P can be represented as,
 ......(1.8.4)
......(1.8.4)
•
where Pr is the radius r and I Pθ, Pϕ are the
two angle components of point P.
2. Differential Elements in Spherical Co-ordinate System
•
Consider a point P (r,θ,ϕ,) in a spherical co-ordinate system. Let each
co-ordinate is increased by the differential amount. The differential
increments in r, θ, ϕ are dr, dθ and dϕ.
•
Now there are two spheres of radius r and r + dr. There are two cones with half
angles θ and θ + dθ. There are two planes at the angles ϕ and ϕ + dϕ measured
from xz plane. All these surfaces enclose a small volume as shown in the Fig.
1.8.6.

•
The differential length in r direction is dr. The differential length in 0
direction is r sin θ dϕ. The differential length in θ direction is r d θ. Thus,
dr
= Differential length in r direction ... (1.8.5)
rd
θ = Differential length in θ direction ... (1.8.6)
r
sin θ dϕ = Differential length in ϕ direction ... (1.8.7)
θϕ•
Hence the differential vector length
in spherical co-ordinate system is given by,
 ....(1.8.8)
....(1.8.8)
•
the magnitude of the differential length vector is given by,
 ....(1.8.9)
....(1.8.9)
• Hence the differential volume of the differential element formed, in
spherical co-ordinate system is given by,
dv
= r2 sin θ dr dθ dϕ......(1.8.10)
•
The differential surface areas in
the three directions are shown in the Fig. 1.8.7.

• The vector representation of these
differential surface areas are given by,
 = Differential vector surface area normal to r direction =
r2 sin θ dθ dϕ...... ...(1.8.11)
= Differential vector surface area normal to r direction =
r2 sin θ dθ dϕ...... ...(1.8.11)
 = Differential vector surface area normal to θ direction =
r sin θ dr dϕ ...(1.8.12)
= Differential vector surface area normal to θ direction =
r sin θ dr dϕ ...(1.8.12)
 = Differential vector surface area normal to ϕ direction =
r dr dθ ... (1.8.13)
= Differential vector surface area normal to ϕ direction =
r dr dθ ... (1.8.13)
3. Relationship between Cartesian and Spherical Systems
•
Consider a point P whose cartesian co-ordinates are x, y and z while the
spherical co-ordinates are r, θ and r2 and ϕ as shown in the Fig.
1.8.8.

•
Looking at the xy plane we can write,
x
= rsin θ cos ϕ and
y
= rsin θsin ϕ
While z = rcos θ
•
Hence the transformation from spherical to cartesian can be obtained from the
equations,
x
= r sin θ cos ϕ, y = r sin θ sin ϕ
and z = r cos θ
•
Now r can be expressed as,
x2
+ y2 + z2 = r2sin2θcos2 ϕ+
r2 sin2 θsin2ϕ + r2 cos2
θ
=
r2 sin2 θ[sin2 ϕ + cos2 ϕ] + r2
cos2 θ
=
r2 [sin2 θ + cos2 θ]=r2
r
= √x2 + y2 + z2
While tan ϕ = y/x and cos θ = z/r
•
As r is known, θ can be obtained.
•
Thus the transformation from cartesian to spherical co-ordinate system can be
obtained from the equations,
 .... (1.8.15)
.... (1.8.15)
• Remember that r is positive and varies
from 0 to ∞ varies from 0 to π radians i.e. 0o to 180° and ϕ varies
from 0 to 2 π radians i.e. 0° to 360°.
Key Point :
While using above formulae, care must be taken to place the angles 0 and 6 in
the correct quadrants according to the signs of x, y and z.
Ex. 1.8.1
Calculate the volume of a sphere of
radius R using integration.
Sol. : The
differential volume of a sphere is,
dv = r2 sin θ dr d√θ dϕ
The
limits for r are 0 to R, as sphere is of radius R.
The
θ varies from 0 to π while 6 varies from 0 to 2 π.

Ex. 1.8.2
Use spherical co-ordinates and integrate
to find the area of the region 0<ϕ<α on the spherical shell of radius α.
What is the area if α = 2π ?
Sol. :
Consider the spherical shell of radius a hence r = a is constant.
Consider
differential surface area normal to r direction which is radially outward.
dSr
= r2 sin θ d θ dϕ = a2sin θ dθ dϕ ... as r = a
But
ϕ is varying between 0 to a while for spherical shell 0 varies from 0 to π.

So
area of the region is 2 a2 α.
If
α = 2π the area of the region becomes 4πa2, as the shell becomes
complete sphere of radius a when ϕ varies from 0 to 2π .
Ex. 1.8.3
Given the two points A (x = 2, y = 3, z =
-1) (r = 4, θ = 25, ϕ = 120o)
Find the spherical co-ordinates of A and cartesian co-ordinates of B. AU: May-10 Marks 8
Sol. :
i) A (x =2, y =3, z = -l)
To
convert to spherical co-ordinates.
r
= √x2 + y2 + z2
=
√(2)2 + (3)2 + (-1)2 = √14 = 3.7416
θ
= cos-1[z/√x2 + y2 + z2
=
cos-1[-1/√-14] = 105.5o
ϕ
= tan-1 y/x = tan-1 3/2 = 56.31o
A (3.7416, 105.5°, 56.31°)
in spherical system.
ii)
B (r = 4, 0 = 25o, ϕ = 120o) hence to convert to cartesian
co-ordinates,
x
= r sin θ cos ϕ = 4 × sin 25° × cos 120° = - 0.845
y
= r sin θ sin ϕ = 4 × sin 25° × sin 120° = 1.464
z = r cos θ = 4 × cos 25° = 3.625
B (- 0.845, 1.464, 3.625)
in cartesian system.
Examples for Practice
Ex. 1.8.4
Convert point P(l, 3, 5) from cartesian
to cylindrical and spherical co-ordinates. [Ans.: P (3.1622, 71.56°,
5), P( 5.916, 32.31o,71.56o)]
Ex. 1.8.5 Convert the point P(3, 4, 5) from cartesian to spherical co-ordinates. [Ans.: P(7.071, 45°, 53.13o)]
Review Question
1.Discuss the
spherical co-ordinate system used to represent field vectors. AU : May-05,18, Dec.-08,
Marks 5
Electromagnetic Theory: Unit I: (a) Vector Analysis : Tag: : represent field vectors, Solved Example Problems - Spherical Co-ordinate System
Related Topics
Related Subjects

Electromagnetic Theory
EE3301 3rd Semester EEE Dept | 2021 Regulation | 3rd Semester EEE Dept 2021 Regulation