Electrical Machines: Unit III: a. D.C. Motors
Characteristics of D.C. Series Motor
• It is seen earlier that motor armature current is decided by the load. On light load or no load, the armature current drawn by the motor is very small. In case of a d.c. series motor, ϕ ∝Ia and on no load as I is small hence flux produced is also very small.
Characteristics of D.C. Series Motor
AU: May-03, 06, 15, Dec.-06, 09,
11, 14
i) Torque-Armature current characteristics
In
case of series motor the series field winding is carrying the entire armature
current. So flux produced is proportional to the armature current.
ϕ α Ia
Hence
Ta α ϕ Ia α Ia2
Thus
torque in case of series motor is proportional to the square of the armature
current. This relation is parabolic in nature as shown in the Fig. 4.14.1.
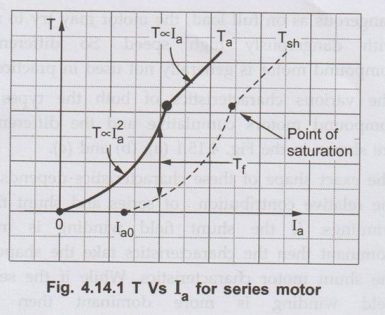
As
load increases, armature current increases and torque produced increases
proportional to the square of the armature current upto a certain limit.
As the entire Ia passes through the series field, there is a property of an electromagnet called saturation, may occur. Saturation means though the current through the winding increases, the flux produced remains constant. Hence after saturation the characteristics take the shape of straight line as flux becomes constant, as shown. The difference between Ta and Tsh is loss torque Tf which is also shown in the Fig. 4.14.1.
At
start as T α Ia2, these types of motors can produce high
torque for small amount of armature current hence the series motors are
suitable for the applications which demand high starting torque.
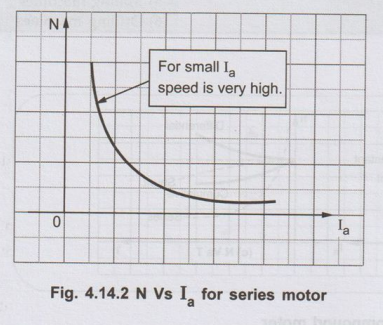
ii) Speed-Armature current characteristics
From
the speed equation we get,
N
α Eb / ϕ α V-IaRa-Ia-Rse/Ia
as Φ∞ Ia
in
case of series motor
Now
the values of Ra and Rse are so small that the effect of change in Ia on speed overrides
the effect of change in V-IaRa-Ia Rse
on the speed.
Hence
in the speed equation, Eb = V and can be assumed constant. So speed
equation reduces to,
N
∞ I /Ia
So
speed-armature current rectangular hyperbola type as Fig. 4.14.2.
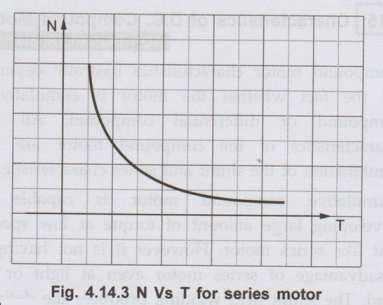
iii) Speed-Torque characteristics
In
case of series motors, T ∝
Ia2 and N∞ I / Ia
Hence
we can write, Να 1 / √T
• Thus as torque
increases when load increases, the speed decreases. On no load, torque is very
less and hence speed increases to dangerously high value. Thus the nature of
the speed-torque characteristics is similar to the nature of the speed-armature
current characteristics.
•The
speed-torque characteristics of a series motor is shown in the Fig. 4.14.3.
1. Why Series Motor is Never Started on No Load ?
• It is seen earlier that
motor armature current is decided by the load. On light load or no load, the
armature current drawn by the motor is very small. In case of a d.c. series
motor, ϕ ∝Ia
and on no load as I is small hence flux produced is also very small.
According
to speed equation,
N∞
1 / Φ as Eb is almost constant.
• So on very light load
or no load as flux is very small, the motor tries to run at dangerously high
speed which may damage the motor mechanically. This can be seen from the
speed-armature current and the speed-torque characteristics that on low
armature current and low torque condition motor shows a tendency to rotate with
dangerously high speed.
• This is the reason why
series motor should never be started on light loads or no load conditions. For
this reason it is not selected for belt drives as breaking or slipping of belt
causes to throw the entire load off on the motor and made to run motor with no
load which is dangerous.
Review Questions
1. Draw and explain
the characteristics of d.c. series ada motor. AU: May-06, 15, Dec.-06, 09, 11, 14, Marks 6
2. Why a d.c. series
motor cannot be started on no load? AU: May-03, Marks 4
Electrical Machines: Unit III: a. D.C. Motors : Tag: : - Characteristics of D.C. Series Motor
Related Topics
Related Subjects

Electrical Machines I
EE3303 EM 1 3rd Semester EEE Dept | 2021 Regulation | 3rd Semester EEE Dept 2021 Regulation