Electrical Machines II: UNIT I: c. Synchronization and Parallel Operation of Alternators
Blondel's Two Reaction Theory (Theory of Salient Pole Machine)
According to this theory the armature m.m.f. can be divided into two components as, 1. Component acting along the pole axis called direct axis. 2. Component acting at right angles to the pole axis called quadrature axis.
Blondel's Two Reaction Theory (Theory of Salient Pole Machine)
It
is known that in case of nonsalient pole type alternators the air gap is
uniform. Due to uniform air gap, the field flux as well as armature flux vary
sinusoidally in the air gap. In nonsalient rotor alternators, air gap length is
constant and reactance is also constant. Due to this the m.m.f.s of armature
and field act upon the same magnetic circuit all the time hence can be added
vectorially. But in salient pole type alternators the length of the air gap varies
and the reluctance also varies. Hence the armature flux and field flux cannot
vary sinusoidally in the air gap. The reluctances of the magnetic circuits on
which m.m.f.s act are different in case of salient pole alternators.
Hence
the armature and field m.m.f.s cannot be treated in a simple way as they can be
in a nonsalient pole alternators.
The
theory which gives the method of analysis of the disturbing effects caused by
salient pole construction is called Two Reaction Theory. Professor Andre
Blondel has put forward the two reaction theory.
Key Point : According to this
theory the armature m.m.f. can be divided into two components as,
1.
Component acting along the pole axis called direct axis.
2.
Component acting at right angles to the pole axis called quadrature axis.
The
component acting along direct axis can be magnetising or demagnetising. The
component acting along quadrature axis is cross magnetising. These components
produce the effects of different kinds.
The
Fig. 3.10.1 shows the stator m.m.f. wave and the flux distribution in the air
gap along direct axis and quadrature axis of the pole.
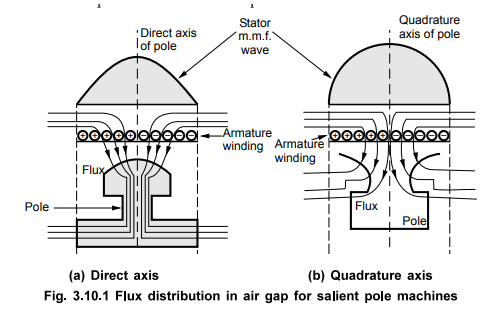
(a)
Direct axis (b) Quadrature axis
The
reluctance offered to the m.m.f. wave is lowest when it is aligned with the
field pole axis. This axis is called direct axis of pole i.e. d-axis. The
reluctance offered is highest when the m.m.f. wave is oriented at 90° to the
field pole axis which is called quadrature axis i.e. q-axis. The air gap is
least in the centre of the poles and progressively increases on moving away
from the centre. Due to such shape of the pole-shoes, the field winding wound
on salient poles produce the m.m.f. wave which is nearly sinusoidal and it
always acts along the pole axis which is direct axis.
Let
Ff be the m.m.f. wave produced by field winding, then it always acts along the
direct axis. This m.m.f. is responsible to produce an excitation e.m.f. Ef
which lags Ff by an angle 90°.
When
armature carries current, it produces its own m.m.f. wave PAR- This can be
resolved in two components, one acting along d-axis (magnetising or
demagnetising) and one acting along q-axis (cross-magnetising). Similarly
armature current Ia also can be divided into two components, one along direct
axis and one along quadrature axis. These components are denoted as,
Fd
= Component along direct axis
FAR
:
Fq
= Component along quadrature axis
Id
= Component along direct axis
Ia
Iq
= Component along quadrature axis
The
positions of FAR, Fd and F, in space are shown in the Fig. 3.10.2.
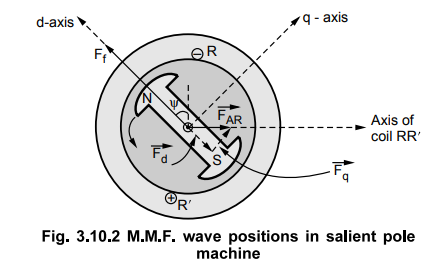
The
instant chosen to show these positions is such that the current in phase R is
maximum positive and is lagging Ef by angle ψ.
The
phasor diagram corresponding to the positions considered is shown in the Fig. 3.10.3.
The Ia, lags Ey by angle ψ.
It
can be observed that Fd is produced by Id which is at 90°
to Ef while Fq, is produced bzy Iq, which is
in phase with Ef
The
flux components of ϕAR which are ϕd and ϕq
along the direct and quadrature axis respectively are also shown in the Fig.
3.10.3.
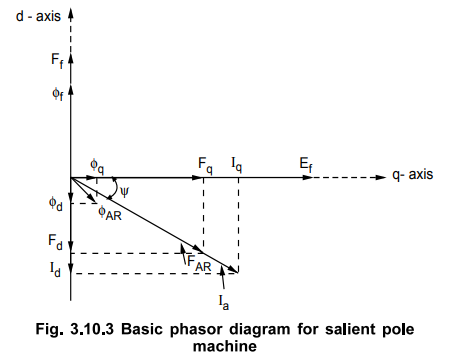
It
can be noted that the reactance offered to flux along direct axis is less than
the reactance offered to flux along quadrature axis. Due to this, the flux ϕAR
is no longer along FAR or Ia. Depending upon the
reluctances offered along the direct and quadrature axis, the flux ϕAR
lags behind Ia,
1. Direct and Quadrature Axis Synchronous Reactances
We
know that, the armature reaction flux ϕAR has two components, ϕd
along direct axis and ϕq along quadrature axis. These fluxes are
proportional to the respective m.m.f. magnitudes and the permeance of the flux
path oriented along the respective axes.
ϕq
= PdFd
where
Pd = Permeance along the direct axis
Permeance
is the reciprocal of reluctance and indicates ease with which flux can travel
along the path.
But Fd = m.m.f. = Kar Id
in phase with Id
The
m.m.f. is always proportional to current.
While Kar is the armature reaction coefficient.
ϕq
= Pd Kar Id
Similarly
ϕq = Pd Kar Id
As
the reluctance along direct axis is less than that along quadrature axis, the
permeance Pd along direct axis is more than that along quadrature
axis, (Pd > Pq).
Let
Ed and Eq be the induced e.m.f.s due to the fluxes ϕd
and ϕq respectively. Now Ed lags ϕd by 90° while Eq lags ϕq by
90°.

The
resultant e.m.f. is the phasor sum of Ef, Ed and Eq.

Substituting expressions for ϕd and ϕq

Now
Xard = Equivalent reactance
corresponding to the d-axis component of armature reaction
=
Ke Pd Kar
and Xarq = Equivalent reactance
corresponding to the q-axis component of armature reaction
=
Ke Pd Kar

For a realistic alternator we know that the voltage equation is,

Where
Vt = Terminal voltage
XL
= Leakage reactance
But 
Substituting
in expression for
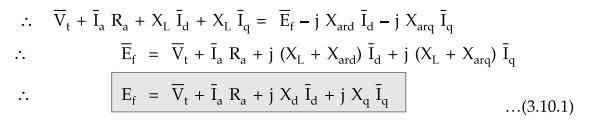
where Xd = d-axis synchronous
reactance = XL + Xard ...(3.10.2)
and Xq = q-axis synchronous reactance
= XL + Xarq ...(3.10.3)
It
can be seen from the above equation that the terminal voltage Vt is
nothing but the voltage left after deducting ohmic drop Ia Ra,
the reactive drop Id Xd in quadrature with Id and the
reactive drop Iq Xq in quadrature with Iq, from the
total e.m.f. Ef.
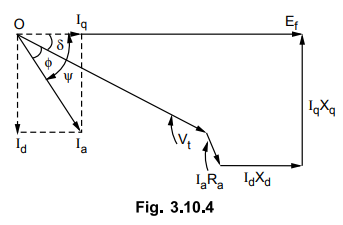
The
phasor diagram corresponding to the equation (3.10.1) can be shown as in the
Fig. 3.10.4. The current Ia lags terminal voltage Vt by
Then add Ia Ra in phase with Ia to Vt. The drop Id
Xd leads Id by 90° as in case purely reactive circuit
current lags voltage by 90° i.e. voltage leads current by 90° . Similarly the
drop Iq Xq leads Xq by 90°. The total e.m.f.
is Ef.
2. Detail Analysis of Phasor Diagram
In
the phasor diagram shown in the Fig. 3/10.4 the angles ψ and δ are not known, though Vt, Ia and ϕ values
are known. Hence the location of Ef is also unknown. The components
of Ia , Id and Iq can not be determined which
are required to sketch the phasor diagram.
Let
us find out some geometrical relationships between the various quantities which
are involved in the phasor diagram. For this, let us draw the phasor diagram
including all the components in detail.
We
know from the phasor diagram shown in the Fig. 3.10.4 that,
Id
= Ia sin ψ …(3.10.4)
Iq
= Ia cos ψ …(3.10.5)
cos
ψ = Iq / Ia … (3.10.6)
The
drop Ia Ra has two components which are,
Id
Rd = Drop due to Ra in phase with Id
Iq
Ra = Drop due to Ra in phase with Iq
The
Id Xd and Iq Xq can be drawn
leading Id and Iq by 90° respectively. The detail phasor
diagram is shown in the Fig. 3.10.5.
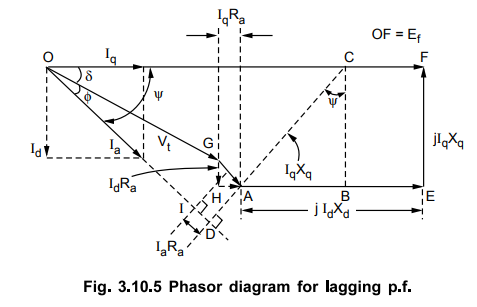
In
the phasor diagram,
OF
= Ef
OG
= Vt
GH
= Id Ra and HA = Iq Ra
GA
= Iq Ra
AE
= IdXd and EF = Iq Rq
Now
DAC is drawn perpendicular to the current phasor Ia and CB is drawn
perpendicular to AE.
The triangle ABC is right angle triangle,

But
from equation (3.10.6),
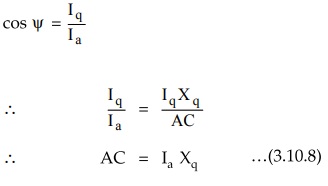
Thus
point C can be located. Hence the direction of Ef is also known.
Now
triangle ODC is also right angle triangle.
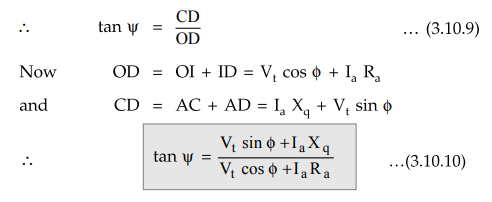
As
Ia Xq is known, the angle ψ can be calculated from
equation (3.10.10) As ϕ is known we can write,
δ
= ψ – ϕ
for lagging p.f.
Ef
= Vt cos δ + Iq + Ra + Id Xd …(3.10.11)
Hence
magnitude of Ef can be obtained by using equation (3.10.11).
Note
In the above relations, ϕ is taken
positive for lagging p.f. For leading p.f., ϕ must be taken negative.
Example
3.10.1 For a salient pole synchronous machine, prove
the d-axis synchronous reactance Xd, can be obtained from its OCC and
SCC. Neglect armature resistance. AU : Dec.-05, Marks 8
Solution
:
The phasor diagram for a salient pole synchronous machine with zero armature
resistance is shown in the Fig. 3.10.6.
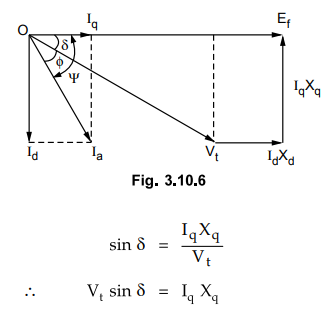
Under
steady state, during short circuit conditions, the terminal voltage Vt,
is zero.
Iq
X q = 0
Iq
= 0
The armature current I, during short circuit conditions is given as,

From
the above phasor diagram it can be seen that
Et
= Vt cos δ + Id Xd
But
Vt = 0 during short circuit conditions .:
Ef
= Id Xd
and
lasc = Id
The
phasor diagram is modified as shown in the Fig. 3.10.6 (a).

The excitation voltage Ef can be obtained from open circuit
characteristics while Iasc can be obtained from short circuit
characteristics for a given field current.

Here
K' is constant while Ld is d-axis synchronous inductance of the synchronous
machine. From the above equation it can be seen that the armature short circuit
current remains substantially constant over wide range of frequency or
alternator speed. So during the short circuit test, the speed of alternator
should not be necessarily the synchronous speed. But at low speeds, the
armature resistance of alternator is comparable with the reactance and thus the
change in armature current is obvious.
Review Question
1. Explain the two reaction theory for the synchronous machines.
AU : May-06, 07, 09, Marks 10
Electrical Machines II: UNIT I: c. Synchronization and Parallel Operation of Alternators : Tag: Engineering Electrical Machines - II : - Blondel's Two Reaction Theory (Theory of Salient Pole Machine)
Related Topics
Related Subjects

Electrical Machines II
EE3405 Machine 2 EM 2 4th Semester EEE Dept | 2021 Regulation | 4th Semester EEE Dept 2021 Regulation