Statistics and Numerical Methods: Unit III: Solution of Equations and Eigenvalue Problems
Short Questions and Answers
Gaussian Elimination and Gauss-Jordan
Statistics and Numerical Methods : Unit - III : Solution of Equations and Eigenvalue Problems : Short Questions and Answers.
SHORT QUESTIONS AND ANSWERS.
1.
In what form is the coefficient matrix transformed into when AX = B is solved
by Gauss-elimination method.
Solution:
Upper triangular matrix.
2.
In what form is the coefficient matrix transformed into when AX = B is solved
by Gauss-Jordan method.
Solution
: Diagonal matrix.
3.
Explain briefly Gauss-Jordan iteration to solve simultaneous equations. [MU.,
Oct. 96]
Solution:
Consider the system of equations AX = B
If
A is a diagonal matrix, then the given system reduces to
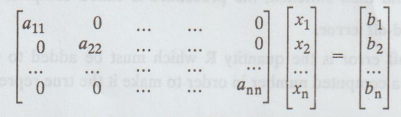
This
system reduces to the following n equation

Hence,
we get the solution directly as

The
method of obtaining the solution of the system of equations by reducing the
matrix A to a diagonal matrix is known as Gauss-Jordan elimination method,
4.
Explain the term "Pivot elements".
Solution:

The
elements a11, a22, … ann which have been
assumed to be non-zero are called pivot elements.
5.
Explain the term 'pivoting'.
In
the elimination process, if any one of the pivot elements a11, a22,
... ann vanishes or becomes very small compared to other elements in that
column, then we attempt to rearrange the remaining rows so as to obtain a
non-vanishing
pivot
or to avoid the multiplication by a large number. This strategy is called
pivoting.
Pivoting
is of two types.
1.
Partial pivoting,
2.
Complete pivoting.
6.
Explain the term 'partial pivoting' and 'complete pivoting'.
Problems
may also arise when the pivot element is close to, rather than exactly equal to
zero because if the magnitude of the pivot element is small compared to the
other elements, the round-off errors can be introduced.
Therefore,
before each row is normalised, it is advantageous to determine the largest
available coefficient in the column below the pivot element. The rows can be
switched so that the largest element is the pivot element. This is called
partial pivoting. If columns as well as rows are searched for the largest
element and then switched, the procedure is called complete pivoting.
7.
Define round-off error.
The
round-off error is the quantity R which must be added to the finite
representation of a computed number in order to make it the true representation
of that number.
8.
The numerical methods of solving linear equations are of two types: one is
direct and the other is………
Solution
:
Iterative
9.
Give two direct methods to solve a system of linear equations. [A.U M/J 2012]
[A.U N/D 2015 R13]
Solution:
(i) Gauss elimination method, (ii) Gauss-Jordan method.
10.
For solving a linear system, compare Gaussian elimination method and
Gauss-Jordan method. [A.U. A/M 2004] [A.U. Model Paper]
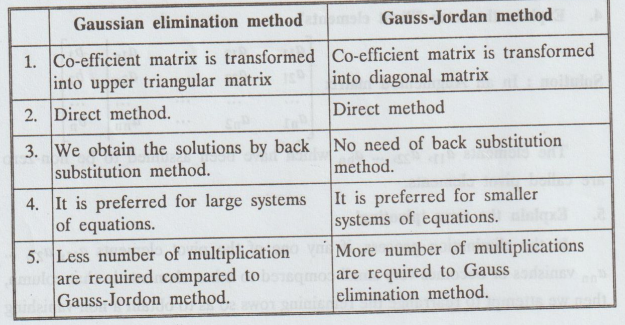
Gaussian
elimination method
1.
Co-efficient matrix is transformed into upper triangular matrix
2.
Direct method.
3.
We obtain the solutions by back substitution method.
4.
It is preferred for large systems of equations.
5.
Less number of multiplication are required compared to Gauss-Jordon method.
Gauss-Jordan
method
1.
Co-efficient matrix is transformed into diagonal matrix
2.
Direct method
3.
No need of back substitution method.
4.
It is preferred for smaller systems of equations.
5.
More number of multiplications eqmo are required to Gauss dainsy elimination
method.
11.
State the principle used in Gauss-Jordan method.
Solution
:
Coefficient
matrix is transformed into diagonal matrix.
12.
Solve the following system of equations by Gauss-Jordan method.
5x
+ 4y = 15, 3x + 7y = 12
Solution
:

13.
Solve the system of equations x-2y= 0, 2x + y = 5 by Gaussian elimination
method. [A.U. M/J 2006]
Solution
:
The
given system is equivalent to

This
is an upper triangular matrix
[From (1) we get [by back substitution]
y
= 1 and x - 2y = 0
.x
– 2 = 0
x
= 2.
Hence
x = 2, y = 1
14.
When does the Gauss elimination method fail?
Solution:
It
fails when any one of the pivots is zero or it is a very small number, as the
elimination processes. If a pivot is zero, then division by it gives over flow
error, since division by zero is not defined. If a pivot is a very small
number, then division by it introduces large round off errors and the solution
may contain large errors.
15.
Can we use partial pivoting in Gauss-Jordan method?
Solution:
Yes.
16.
Write the procedure involved in Gauss elimination method. [A.U M/J 2014]
Solution:
In
this method, starting with the augmented matrix of the system, using elementary
row operations, we transform the augmented matrix into an upper triangular
matrix.
17.
Solve, x+3y+3z = 16, x+4y+3z = 18, x+3y+4z = 19 by mala Gauss-Jordan method.
Solution:
Given:
x + 3y + 3z = 16; x + 4y + 3z = 18; x + 3y + 4z = 19

Statistics and Numerical Methods: Unit III: Solution of Equations and Eigenvalue Problems : Tag: : Gaussian Elimination and Gauss-Jordan - Short Questions and Answers
Statistics and Numerical Methods: Unit III: Solution of Equations and Eigenvalue Problems
Under Subject
Statistics and Numerical Methods
MA3251 2nd Semester 2021 Regulation M2 Engineering Mathematics 2 | 2nd Semester Common to all Dept 2021 Regulation
Related Subjects

Professional English II
HS3251 2nd Semester 2021 Regulation | 2nd Semester Common to all Dept 2021 Regulation
Statistics and Numerical Methods
MA3251 2nd Semester 2021 Regulation M2 Engineering Mathematics 2 | 2nd Semester Common to all Dept 2021 Regulation
Engineering Graphics
GE3251 eg 2nd semester | 2021 Regulation | 2nd Semester Common to all Dept 2021 Regulation
Physics for Electrical Engineering
PH3202 2nd Semester 2021 Regulation | 2nd Semester EEE Dept 2021 Regulation
Basic Civil and Mechanical Engineering
BE3255 2nd Semester 2021 Regulation | 2nd Semester EEE Dept 2021 Regulation
Electric Circuit Analysis
EE3251 2nd Semester 2021 Regulation | 2nd Semester EEE Dept 2021 Regulation
Physics for Electronics Engineering
PH3254 - Physics II - 2nd Semester - ECE Department - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation
Electrical and Instrumentation Engineering
BE3254 - 2nd Semester - ECE Dept - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation
Circuit Analysis
EC3251 - 2nd Semester - ECE Dept - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation
Materials Science
PH3251 2nd semester Mechanical Dept | 2021 Regulation | 2nd Semester Mechanical Dept 2021 Regulation
Basic Electrical and Electronics Engineering
BE3251 2nd semester Mechanical Dept | 2021 Regulation | 2nd Semester Mechanical Dept 2021 Regulation
Physics for Civil Engineering
PH3201 2021 Regulation | 2nd Semester Civil Dept 2021 Regulation
Basic Electrical, Electronics and Instrumentation Engineering
BE3252 2021 Regulation | 2nd Semester Civil Dept 2021 Regulation

Physics for Information Science
PH3256 2nd Semester CSE Dept | 2021 Regulation | 2nd Semester CSE Dept 2021 Regulation
Basic Electrical and Electronics Engineering
BE3251 2nd Semester CSE Dept 2021 | Regulation | 2nd Semester CSE Dept 2021 Regulation

Programming in C
CS3251 2nd Semester CSE Dept 2021 | Regulation | 2nd Semester CSE Dept 2021 Regulation